The UniProjection Project is funded by the Science and Technology Foundation (FCT) in Portugal and is established at the Institute for Systems and Robotics (ISR), at the Department of Electrical and Computer Engineering of the University of Coimbra, Portugal.
The aim of the project is to study the geometric properties of the projection in non-single viewpoint (NSVP) vision systems composed of curved mirrors and a camera, in the field of computer vision and computer graphics. Our mission is to achieve a unified projection model for generic systems composed of curved mirrors, lenses or generic reflectors and to develop some applications on fields so different as forward rendering in computer graphics or endoscopy in medical surgery.
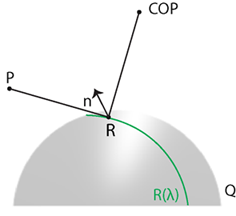
As part of the Project, we enhanced a method, called Quadric Intersection (QI) Method. This QI Method was originally developd by the Principal Investigator (PI) Nuno Gonçalves in his PhD thesis and it computes the reflection point on a quadric surface reflector when reflecting a light traveling from a known source to a known destination. The image at the right shows the corresponding reflection point (R) of point P on a curved mirror (represented by the quadric Q) to the camera center of projection (COP). Our method reduces the search space of the parameterization of the reflection point to a single parameter. This analytical method is based on the intersection of two quadric surfaces in space being one of them the mirror surface, expressed by a quadric mirror, and the second one an analytical surface derived from the absolute dual quadric. The reflection point is proved to belong to the intersection of these two quadrics and since their intersection is a quartic in space, its parameterization is reduced to a single parameter curve.
We are now considering spheres, hyperbolic and parabolic mirrors but we are studying an algorithm that is able to use arbitrary surfaces that are approximated by a known quadric. We also intend to develop the QI Method in the GPU (as scientific computing) in order to further accelerate it.
As for the applications, we are pursuing two distinct tracks.
On one side, we are developing a technique to render images with reflections on the scene (forward projection). The aim of this application track is to achieve a fast and accurate reflection rendering tool to compete with the leading techniques used knowadays.
On the other side, we are developing some techniques to control de effect of light projected in NSVP catadioptric systems. Optical effects such as radial distortion and vignetting are being integrated in Shape From Shading (SFS) methods to achieve 3D reconstruction of objects using endoscopes at minimal invasive surgical procedures. Our approach to this track is mainly based on geometry and calibration.